
�������: 1-15 ���鵽��֪ʶ�� ���ա������ѧ���� �ռ�����ؼ�¼312�� . ��ѯʱ��(0.402 ��)
�ռ������������뼼��
�ռ� ������ ����
2023/8/19
�����ҹ��ռ������Ľ����������˶������������ռ���еϵͳ�У����ռ���Ч�غɵ���������˸��ߵ�Ҫ��Χ����һҪ���ռ���е�ij�������Ҳ��Ϊʵ���ռ��˶������������Ĺؼ�����֮һ��Ŀǰ����������Ѿ��ɹ������Ʊ��ռ���е������Ҫ�й��ͣ�silicon oil�����ۦ�ϩ����PAO����ȫ�����ѣ�PFPE����������������飨MACs������̼���͵ȡ��ÿ�������ռ�ң�������������������е�������ϵͳ��...
�����ռ������´��ͺź���������ѧ����ʵ��װ�������鷽����
�����Ǻ��������ռ�������������ɸ�������Ĺؼ�����.�����������й��ռ����Ƽ�����ȥ50�������ķ�չ�ɹ�,�ܽỮ��Ϊ��������̬���ơ���̬������ơ�����֪−����−ִ�С�(Perception-decision-action,PDA)����������������,���������˸�������Ҫ��չ�Ļ�����,Χ�Ƴ���ṹ��������̬������ơ�����ռ����Ŀ��ơ����绯��������Ⱥ���ơ�����̽����������ϵͳ����...
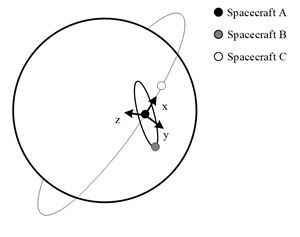
�й���ѧԺ�����ռ���ѧ���Ŀ�����Ա���һ�ֽ��������λ��ʸ���۲����ݵı�Ӻ�����������λ������ͼ��
���λ�� ʸ���۲����� ��Ӻ����� ������λ
2023/2/17
����������о���������������Բ�����Ϣ����ʵ�ֱ�Ӻ��������������������У������������Ծ�����Ϣ��ͨ�����������Dz����õ����������(LOS)��Ϣ��ͨ����ѧ��������õ����������������ṩ�Ĺ��Ի��������λ��ʸ��ת������������ϵ��ͨ����һ��ʱ���ڵ����λ��ʸ��������������������ȷ�����г�Ա�������ľ��Թ��Ҫ�ء����ַ�����Ҫ��������Ϣ���뵽����˲����У��Ӷ�ʵ�����������������Ҫһ�����ȵĺ�...
��Ի����������˻��Ľ������ռ�Ӧ����������ȱ�ٵ����վ���������������,�ɿ����ܵ�Զ���봫���ص�����ȫ��Ϣ��Ҫ��,�о������˻���ɵ��ƶ�Ad-Hoc�����Զ����ͨ������,����������ռ�Ӧ���������յؽڵ㶯̬Эͬ����.����,�Ը�������������ϵͳ��ģ;���,��������ģ�������˻���Ӵ�Χ�����л���Ư�Ƶط�ɢ�ڼ��������ص�ͱ�ӵ����Ϸֲ����,���ṩ�ɿ�ͨ�ŵ�ͬʱ,��ϵͳͨ���ܺĺ��ƶ��ܺĵļ�...
�ռ���Ϣ�뵼����λ�о���
���ǵ�����λ ���ص����⼼�� Ӧ�÷���ϵͳ
2022/9/19
�����ſ����ռ���Ϣ�뵼����λ�о���һֱ�ѡ�������Һ͵ط�������������Ƽ�ǰ�أ������������£���ֲ�ѧ�������ϡ���Ϊ��չ������������ڼ������ºͳɹ�Ӧ�ã��ǹ��ڽ���������ǵ�����λ�Լ�GNSS/GIS/RS��3S�������뼼���о��Ļ�������չ������٤����ŷ�ǽ������з����������о����ġ�������Դ�����ص����⼼���ص�ʵ���ҡ�
�ɹ���Ի������˻��Ը��ӿ������ߵ��ź���⼼����ϵͳ�������о�����Ӳ����Ƽ��ɡ��źŲ����㷨��������ƽ̨������˻�����ʱ�ÿյ��ĸ���������˴��¡�
�й��Զ���ѧ���ռ����˶������רҵίԱ��
�й��Զ���ѧ�� �ռ���� �˶������
2022/12/31
�ռ����˶������רҵίԱ�������1979��10�£��ҿ���λΪ�������ƹ����о�����ʱ�α������ƹ����о������������ܯ��������רί��ĵ�һ��͵ڶ�������ίԱ��������������רί�������͵��Ľ�����ίԱ����������������רί��ĵ���졢������͵��߽�����ίԱ��
���ڸ��ռ��ֱ�������Ӱ����½���������������������
�½� �߿ռ�ֱ��� ����Ӱ�� �������� ������� ���� �� ����
2019/4/16
�����������½���������������������ø��ռ��ֱ���ң��Ӱ����������ʶ��,���ӿ��١�ȷ�ػ�ȡ������������ֲ�������ֲ�����,��������ز������ߵ��ƶ���ũ����ľ�ȷ�������������� �������½�����������Ҫũ����Ϊ�о�����,���û�����������������ң��Ӱ������,ͨ���ȽϹ�����ͼ��SAM����֧����������SVM����CART��������DTs�������ɭ�֣�RF����4�ֻ���ѧϰ�㷨�ڸ��ռ��ֱ�������Ӱ��...
�������ڵ����е������Ч��֤�ռ���е�ۿ����ɵ�����, �����о��ռ���е�ۺ͵����е��ϵͳ�� �Ķ���ѧ��Ч�����Ϳ���������. ����, �������ٷ����о������е�ۺ��ռ���е��֮��Ķ���ѧ��Ч����, ���� �ڵ�Ч������Ƶ����е��ϵͳ. ���, �������ٷ��������ռ��͵����е��ϵͳ��Ŀ���������, ��Ƶ��ռ��� е�ۿ�����ͨ�����������ɽ�����ת��Ϊ�����е����Ӧ�Ŀ�����. ���, ���ǵ����е�ۻ�����...
�ռ�Ŀ�꿨�����˲�ϡ�����
ISAR���� �������˲� ϡ�� ����
2018/5/21
���ڿ������˲���(KF)�����������źŹ������ܣ���KF��̰���㷨���ϣ����ĸ���ϡ��Լ���µĻ���KF���ռ�Ŀ����ϳɿ��״�(ISAR)���������ǵ���Щ�ռ�Ŀ��ߴ�ϴ�������ߴ粿������������ʱ��ϳ���������Խ�ֱ浥Ԫ�߶�(MTRC)�ͷ�λ��2����λ���ƣ����ȶԻز�����MTRCУ����Ȼ������2����λ�Ĺ۲����ͨ��ʹͼ������������Ŀ��ת�����ٶȣ���þ۽�Ŀ��ͼ��������ת������...
���ϡ��ֽ������ֵ���ԭ�������Ӵ��ȱ�㣬�������һ��������ʽ��λ�źŵĿ���ϡ��ֽ��㷨�����㷨����������ʽ��λ�źŵ��ص㣬��ԭ���źű任���������ռ��źţ����������������ռ��źŹ�����Ӧ�������ֵ䣬Ȼ���������ƥ���ٷ��������ϡ��ֽ⣬�������ϡ��ֽ�ԭ�����ԭ���źŵ�ϡ��ֽ⡣���㷨��ԭ���źű任��������ͬ���ռ��źţ�������������ͬ�������ֵ䣬�ԱȲ���һ�������ֵ�⣬���ֲ������������ֵ��...
������Զ�GEO�������ڹ�ȼ�ϼ�ע���Ի���ȼ��վ���ڹ��עģʽ�������о��������һ�ֻ���ȼ��վ�Ŀ�����ʽ�ڹ��ע������ȼ��Ż��㷨��ͨ����˫������ת���������������������˹��ת���ٶ�������ת��ʱ��֮��Ĺ�ϵ���ڴ˻������������˻���ȼ��վ�Ķ�GEO�������ڹ��ע�������ģ�ͣ������ݵ���ģ�͵ı�����Լ����ϵ�������˿����ڹ��ע��ҵ˳�����ҵʱ������Ż��Ķ�GEO�������ڹ��ע�����Ŀ���Ż�ģ...
���װ�������˻�е�۵ĺ������Ե���Բ����ϵ��ռ�Ŀ�����γ������Ʒɣ����������C��W���̣������Σ��о�ͨ����е��ץȡ��Ŀ���ϵͳ����ѧ��ģ���Ƶ��������⡣��Ŀ�������ת�ο�ϵ�£����÷ǹ���ϵ�µ��������շ�����ѧ�������������˻�е��ϵͳ����ѧ���̡����Թ������Ӱ�죬��ģ�ͽ����˺������ڴ˻���������˻�е��ĩ��ִ��������е��ץȡĿ���Ѱ���Ƶ����ƹ��ɡ�Ȼ�����ԭʼ����ģ�ͣ�������ֵ����У�顣���...
������в����ֶ����ռ��Ǻ���Ŀ�����������е����⣬������Ҫ������ToF��Time��of��Flight��������ռ�Ӧ���еĿ����ԡ������ܽ����ռ��Ǻ���Ŀ������������״�����в����ֶΣ���������ToF�����ԭ������չ�����ԷǺ���Ŀ���������Ϊ����������ָ����з��������Ž�ToF����������ռ�����������ֶν������ܱȽϣ��������еĹؼ�������������������ToF�����δ����չ���Ƽ������ռ��е�Ӧ�ý���...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...