
搜索结果: 1-15 共查到“知识库 信息科学与系统科学 学”相关记录52条 . 查询时间(1.417 秒)
天津科技大学人工智能学院复杂装备可靠性建模与优化科研团队介绍(图)
天津科大 复杂装备 建模 优化
2024/8/11
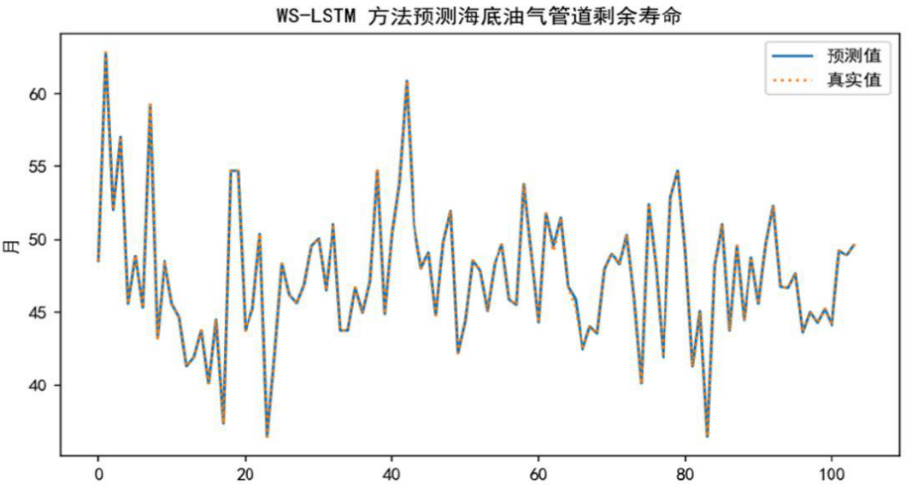
天津科技大学人工智能学院复杂装备可靠性评估与优化团队由刘颖教授、李孝忠教授、胡晓彤副教授、李玉峰副教授、刘素娟副教授、李敏、于洋7位教师组成,团队主要从事装备可靠性评估、故障诊断、视情维修决策、知识推理、不确定信息处理合等领域的研究,具有交叉学科的特征。团队承担了包括国家自然科学基金、教育部人文与社会科学基金、天津市自然科学基金以及横向课题等科研项目10余项;在国内外重要学术期刊发表学术论文60余...
天津科技大学人工智能学院人工智能与车辆安全工程科研团队介绍(图)
人工智能 车辆安全 天津科大
2024/8/11
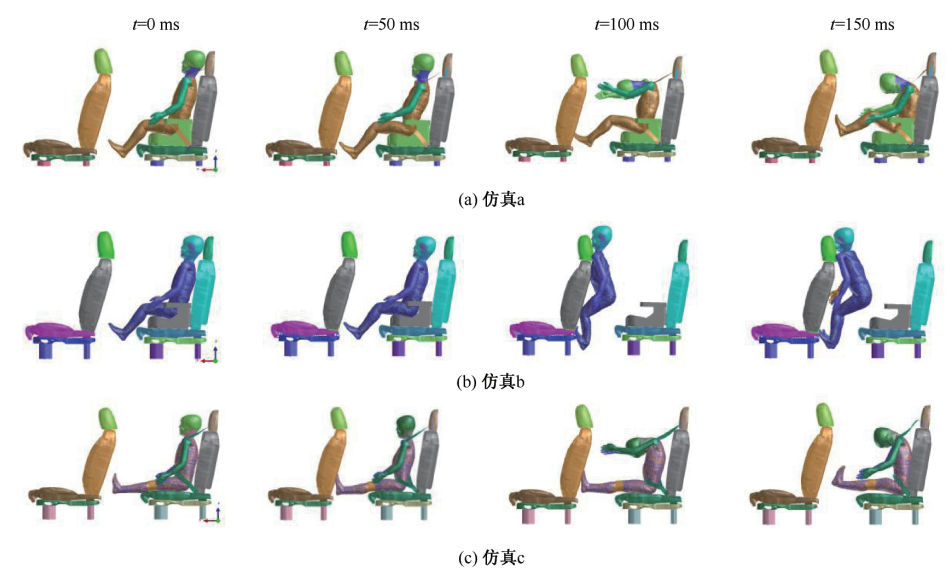
天津科技大学人工智能学院人工智能与车辆安全工程团队由阮世捷教授、王林副教授、刘思、李佳4位教师组成,团队主要从事车辆安全、人体损伤生物力学、有限元方法建模等领域的研究,具有交叉学科的特征。团队承担了包括国家自然科学基金、天津市科委基金项目、美国福特汽车公司“高等学校科学研究项目”以及横向课题等科研项目10余项,在国内外重要学术期刊发表学术论文100余篇。
翻滚目标逼近的虚拟域逆动力学轨迹规划
翻滚目标 相对动力学 逆动力学 轨迹规划
2019/3/15
针对追踪星自主逼近和跟踪翻滚目标特定部位的最优规划问题, 提出了一种基于虚拟域逆动力学的多约束最 优逼近轨迹规划方法.首先, 在翻滚目标本体系下建立追踪星相对于翻滚目标特定部位的相对轨道动力学方程, 并建立 追踪星本体系相对于翻滚目标期望固连坐标系的相对姿态动力学方程; 其次, 考虑目标星外形、敏感器视场和执行机构 控制能力等约束条件, 建立时间/能量最优规划模型; 然后, 采用序列二次规划(se...
局部信息约束下网络演化博弈的动力学与优化
控制网络演化博弈 优化 局部信息 半张量积
2019/3/15
网络演化博弈的优化问题是混合值逻辑网络的一个自然推广. 本文研究了一类网络演化博弈的优化控制问题, 其中每个控制个体在极大化自己的收益时只能获取到邻域信息. 首先, 利用矩阵的半张量积, 将局部信息约束下控制网 络演化博弈的动力学转化为相应的代数形式. 然后得到了局部信息约束下确定型网络演化博弈的最优控制序列. 最后, 基于动态规划的解, 研究了局部信息约束下概率型网络演化博弈的优化控制问题, 得...
连接界面上存在的跨尺度、多物理场和非线性行为是引起结构复杂非线性动力学的主要原因。由于连接界面力学行为的复杂性,以及对连接界面进行直接试验观测的困难,连接界面的力学建模一直是非常具有挑战性的科学问题。本文首先从分析结合面的跨尺度物理机理入手,将名义的光滑平面视作凹凸不平的粗糙面,考虑单个微凸体的黏滑摩擦行为,建立接触载荷与变形的非线性关系,然后采用GW(Greenwood和Williamson, ...
气动阻力作用下电动力绳系动力学及控制研究
电动力绳系 气动阻力 稳定控制 多段系绳结构
2014/4/15
针对电动力绳系轨道机动控制与系绳稳定控制互相耦合的问题,提出通过结构设计使二者解耦控制的方法。采用多段系绳结构,通过调节不同段系绳中电流的大小和方向,使轨道机动和系绳稳定实现独立控制。分析气动阻力作用下的系绳运动规律,设计控制器来调节系绳中的电流以抑制系绳通电时产生的偏心力矩和初始扰动所引起的系绳天平动。最后进行了仿真研究,结果表明:气动阻力作用下惯性系绳以初始扰动为幅值在平衡位置作等幅振荡;和传...
中智学在四段式方法中的应用
中智学 四段式 四段式方法 中智集合 “哈姆雷特” “狮子王” 爱迪生电灯 “五行”学说 “多行并存”学说 正反及中性和综合万有引力定律(扩充的万有引力定律) 正反及中性和综合相对论(扩充的相对论)
2015/5/28
“四段式”是黑格尔关于一切发展的正题、反题、合题“三段式”的扩充。四段式包括:“广泛的正题(广正)”、“广泛的反题(广反)”、“最重要最复杂的普遍联系(普联)”、“广泛的合题(广合)”。四段式方法是科学技术和文学艺术等领域实现创新的有力武器,在四段式方法中应用中智学的理论和成果,可以更有效地发挥四段式方法的巨大作用。本文定义了四段式中的两类中智集合,给出中智学在四段式方法中获得成功应用的若干实例,...
针对时变非线性系统难以建模的问题, 提出了基于动力学特性聚类的多维泰勒网模型, 对系统进行辨识与预测. 首先讨论了多维泰勒网模型构造方法和非线性系统动力学特性聚类的定义; 然后给出基于动力学特性聚类的多维泰勒网自重构算法; 最后通过实例说明基于动力学特性聚类多维泰勒网在实际中应用的方法, 实例结果验证了该方法的有效性.
随着时间的推移,现代自组织理论的意义已经日益明显。在由它开辟的“探索复杂性”的研究方向上,混沌动力学的崛起,又把我们的认识大大推进了一步。混沌动力学的重要性是发现系统在远离平衡条件下,不仅可以自发进入一种有组织状态,而且还可以进入一种特殊“有序”的混沌状态。本文将对这门崭新学科的来龙去脉以及在自然观上带来的重要启发,作比较系统的探讨。
讨论了漂浮基空间机械臂捕获未知运动目标卫星的接触碰撞动力学建模和接触碰撞后系统镇定运动的控制问题。利用第二类拉格朗日方法和牛顿-欧拉法分别建立了接触碰撞前漂浮基空间机械臂和目标卫星两分体系统的动力学模型;以此为基础借助于空间机械臂与目标卫星接触点间的运动几何关系、力传递关系,计算了接触碰撞所产生的影响效应;捕获卫星后,联立空间机械臂与卫星接触碰撞前的动力学模型,建立了接触碰撞后两系统组合体动力学模...
人类的历史, 是一部处理矛盾问题的发展史. 根据一定的程序解决矛盾问题, 利用计算机和网络, 帮助人们处理矛盾问题, 称为矛盾问题智能化处理. 为了实现矛盾问题智能化处理, 必须研究如何用形式化表示矛盾问题及其解决过程, 研究处理矛盾问题的规律, 建立处理矛盾问题的方法体系, 研制处理矛盾问题的计算机软件, 这就产生了一门新的学科――可拓学. 本文介绍可拓学的基础理论、方法体系及其应用情况, 并讨...
视频:西安交通大学系统工程第10讲 系统仿真及系统力学(SD)方法1。
Stewart平台动力学建模及鲁棒主动隔振控制
Stewart平台 主动隔振 鲁棒控制 加权函数
2014/4/15
未来复杂航天器低频模态密集,其敏感载荷要求很高的指向精度和稳定度,只对航天器本体姿态控制很难满足要求。本文采用Stewart超静平台对敏感载荷进行6自由度主动隔振,建立了非线性动力学模型,并根据线性模型设计了多变量鲁棒控制器,采用DK迭代算法求解。频域分析可得Stewart平台对3~800Hz的扰动主动隔振大于25dB,仿真证明Stewart平台对10Hz谐波扰动隔振性能优于40dB,对白噪声随机...
刚体单元及其在多体系统动力学中的应用
多体系统 刚体单元 转动惯量
2014/5/22
多体系统动力学分析软件要求人工输入形状复杂物体的质量、质心位置和转动惯量,而实际上这些参量并不容易获得。本文探索了一种以组成物体的刚体单元为基本要素的新方法,并结合实际需要具体构造了刚性四面体和刚性梁单元。以刚体单元为基础并内嵌网格剖分模块的分析软件能够自动获得这些参数,从而具备处理任何复杂系统的能力。仿真结果的对比分析验证了单元构造的正确性。