
搜索结果: 1-3 共查到“机械臂运动学”相关记录3条 . 查询时间(0.129 秒)

机械臂运动学反问题的闭形式解取得进展(图)
机械臂运动学 反问题 闭形式解
2023/1/5
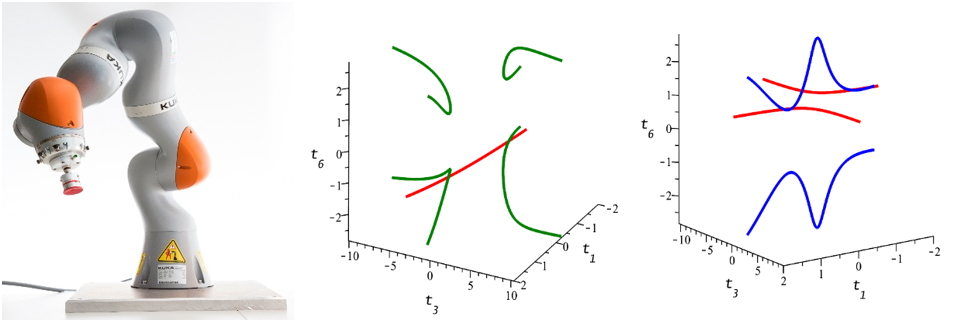
机械臂是目前应用最广的工业机器人。冗余机械臂是一类更加灵活、更适用于人机合作的工业机械臂,其运动学反问题与奇异性是机器人控制过程中的基础问题。数学机械化实验室李子佳副研究员与奥地利乔安娜研究所的Hofbaur教授等人合作,给出了一类冗余机械臂的运动学反问题的闭形式解。他们利用Gr?bner基等工具给出了详尽的机械臂运动奇异性分析。相关工作被机器人顶级期刊IEEE Transactions on R...
机械臂是目前应用最广的工业机器人。冗余机械臂是一类更加灵活、更适用于人机合作的工业机械臂,其运动学反问题与奇异性是机器人控制过程中的基础问题。数学机械化实验室李子佳副研究员与奥地利乔安娜研究所的Hofbaur教授等人合作,给出了一类冗余机械臂的运动学反问题的闭形式解。他们利用Gr?bner基等工具给出了详尽的机械臂运动奇异性分析。相关工作被机器人顶级期刊IEEE Transactions on R...